
参数优化器
设有数据集A,其中每一个数据具有参数x1,x2,x3和离散标签y,我们希望寻找一个函数f,该函数f具有映射关系f(x1,x2,x3)=y $$ 数据集A=[a_{1}, a_{2},a_{3},...] $$ $$ 数据a=(x_{1},x_{2},x_{3},y) $$ $$ 求函数f,f(a)=y,f(A_{i})=f(a_{i})=f(x_{i1},x_{i2},x_{i3})=y_{i} $$ 以线性拟合为例 $$ 函数f(a)=f(x_{i1},x_{i2},x_{i3})=z_1x_{i1}+z_2x_{i2}+z_3x_{i3}=y $$ 求得函数f即求得函数f的参数z1,z2,z3,最优化算法给出了一种方法
真实标签y和预测标签y‘有差异loss(y,y'),当loss无限趋近于0时,我们可以认为我们寻找到了一个函数f,f(a)=y
通过调整参数,来逐渐缩小loss,那么我们需要知道参数对loss的影响,也就是loss对参数求导 $$ \theta=\frac{\partial loss}{\partial z} $$ 即当θ大于0时,减小参数可使loss下降,当θ小于0时增大参数可使loss下降
如上所述,对参数的调整我们只知道进行增加或减少,但调整幅度依然未知,但有一点是清楚的,我们希望收敛过程迅速,也就是要以最大效率使得损失loss下降
方向导数和梯度
方向导数用于表达函数f在某点处沿某一方向上的变化率,设函数f(x,y)在点p(x0,y0)处可微分,则函数在该点沿任意方向的方向导数存在
$$ \frac{\partial f}{\partial l} \mid_{(x_0,y_0)}=f_{x}^{'}(x_0,y_0)\cos \alpha+f_{y}^{'}(x_0,y_0)\cos \beta $$
用通俗的语言表达即为,参数x,y在点p处独立对函数f产生的影响在向量{cosα,cosβ}方向上的复合,从而描述了函数f在点p处沿向量{cosα,cosβ}方向上的单位变化率
向量{cosα,cosβ}是变化的,其中有一个向量方向可使函数在该方向上变化率最大,则这个向量方向称为梯度
$$ 由向量点积a(a_1,a_2) \cdot b(b_1,b_2)=a_1b_1+a_2b_2 \quad \vec{a} \cdot \vec{b}=|a||b|\cos \angle(a,b) 得 $$
$$ \frac{\partial f}{\partial l} \mid_{(x_0,y_0)}=f_{x}^{'}(x_0,y_0)\cos \alpha+f_{y}^{'}(x_0,y_0)\cos \beta $$
$$ = { \frac{\partial f}{\partial x}, \frac{\partial f}{\partial y} } \cdot {\cos \alpha ,\cos \beta } $$
$$ =|{ \frac{\partial f}{\partial x}, \frac{\partial f}{\partial y} }||{\cos \alpha ,\cos \beta }| \cos \theta $$
$$ 已知cos \theta \in [-1,1],当\theta=0时\cos \theta=1上式具有最大值 $$
上式中角θ是向量的夹角,当θ等于0意味着向量重合,即函数f沿着向量
$$ {\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}} $$
方向变化速率最快,即该方向就是函数f的梯度
综上所述,深度学习问题递归优化参数实现函数收敛的过程中,应该沿函数梯度方向变化,即函数f的参数调整应当如下
$$ w_{new}=w_{old}-rate\cdot \frac{\partial Loss}{\partial w} $$
该方法称为梯度下降法
优化器
我们虽然找到了迭代调整参数实现模型收敛的方法,但是模型沿着梯度方向每次调整的步长应该为多少呢?由于神经网络的发展和不同场景的需求,产生了许多种不同的参数调整策略,虽然都基于梯度下降。在深度学习框架中我们将种种调整策略模块称为参数优化器(optimizer)
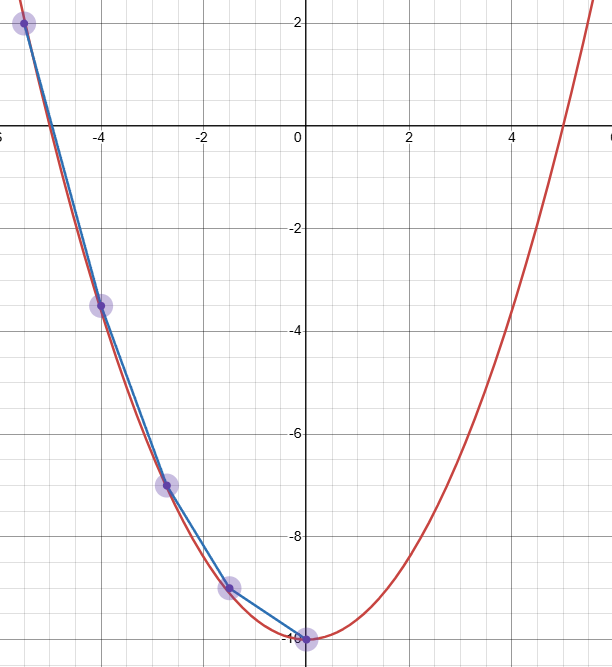
最理想的模型拟合过程如下图所示
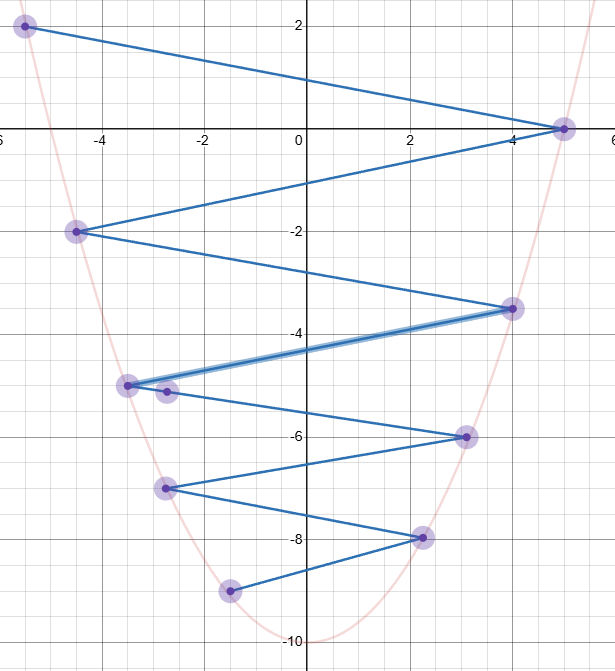
但是深度学习模型往往十分复杂,存在局部最优,并且当调整幅度过大会出现跳跃
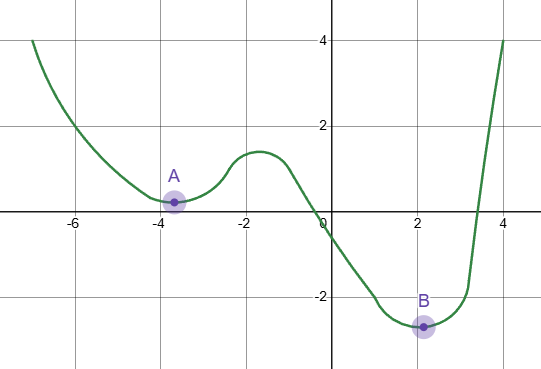
如图所示A点为局部最优,B点为全局最优,模型可能收敛到局部最优的A点
出于对上述问题的考虑,提出了多种优化器策略
SGD随机梯度下降
每次迭代选取数据集中的单个样本计算梯度,并据此更新参数,普通的SGD算法容易陷入局部最优,拟合过程存在较大波动。该算法具有如下变种和优化
mini-batch SGD
每次迭代使用一小批样本计算梯度,取均值用于更新参数,该算法通常能在效率和效果之间提供一个好的平衡
momentum动量
由上述梯度下降法可知,梯度指向的是局部最优,而非全局最优,而拟合过程中最主要的问题就来源于此,为了解决陷入局部最优以及拟合过程波动的问题,提出了动量法
momentum动量概念来自于物理学中的动量概念,用于刻画物体运动的状态,定义为物体质量和速度的乘积p=mv,动量具有矢量性,其方向与速度方向一致,多体系统的总动量是各物体动量的矢量和。从形式上看,动量算法引入了变量v充当速度角色,代表了参数在参数空间移动的方向和速率
动量法抛弃了一般SGD只使用当前梯度的方法,而是将过去的梯度也纳入当前节点的计算,就好像一个滑滑板的人,不断用脚蹬滑板,滑板不断积累过去的速率并朝着一个统一的方向运动,动量法SGD通过积累过去的梯度使得拟合过程沿着相对统一的方向前进,避免了病态的波动 $$ 初始速度v=0 $$ $$ v_{t}=\alpha v_{t-1} - \frac{\partial Loss}{\partial w} $$ $$ w_{new}=w_{old}+rate*v_{t} $$ 学习率rate和动量参数α[0,1]越大,之前梯度对现在方向的影响越大,α通常设置为0.9
Nesterov动量
nesterov动量法是在传统动量法的基础上的改进,笼统的解释是,nesterov动量法提供了前瞻性
传统动量的梯度计算如下: $$ \frac{\partial Loss}{\partial w} $$ nesterov动量的梯度计算如下: $$ \frac{\partial Loss}{\partial (w+\alpha v_{t-1})} $$ 可以看到nesterov动量法不在当前位置计算梯度,而是向动量方向“前进”后再计算梯度
nesterov动量法比传动动量法收敛速度更快,并更容易跳出鞍点
参数范数惩罚
深度学习的目的是构建一个函数模型,尽可能的拟合应用场景中所涵盖的数据,但往往训练模型使用的数据只是真实数据中的部分采样,所以会出现一个奇怪的现象,模型在训练数据上表现良好,但是在真实场景中表现差劲,这就是所谓的过拟合。所以很多研究者设计出了多种策略来改善该问题,这些策略统称为正则化
许多正则化方法通过对目标函数Loss添加一个参数范数惩罚Ω(w)来限制模型的学习能力 $$ \bar{Loss}(w,x,y)=Loss(w,x,y)+\alpha \Omega(w) $$ α是用于调整范数惩罚项Ω对目标函数影响的超参数,当α为0代表没有惩罚,α越大则代表惩罚越大。选择不同的参数范数惩罚Ω,会得到不同偏好的解
L2正则化
该正则化策略通过向目标函数Loss添加一个范数惩罚项Ω(w)
$$ \Omega(w)=\frac{1}{2} |w |_{2}^{2} $$
该正则化策略也被称为“岭回归”,通常对于正则化策略的表现,我们通过目标函数的梯度来观察,对于L2正则化而言,其变化后的目标函数如下
$$ \bar{Loss}(w,x,y)=Loss(w,x,y)+\frac{\alpha}{2}w^{T}w $$
则与之对应的梯度为
$$ \frac{\partial \bar{Loss}}{\partial w}=\frac{\partial Loss}{\partial w}+\alpha w $$
对应的权重更新为
$$ w_{new}=w_{old}-rate*(\frac{\partial Loss}{\partial w}+\alpha w_{old}) $$
$$ =(1-\alpha)w_{old}-rate*\frac{\partial Loss}{\partial w} $$
可以看到在梯度更新时先将原梯度进行缩放再进行调整,超参数α∈[0,1]
Adam自适应矩估计
该方法结合了动量法和RMSProp自适应学习率
RMSProp自适应学习率
类似于动量法,RMSProp也要记录历史梯度信息 $$ R_{t}=\alpha R_{t-1}+(1-\alpha)G_{t}^{2} $$ $$ \alpha 为超参数,(0,1),用于控制历史梯度的影响程度 $$ $$ G_{t}为当前梯度 $$
参数更新
$$ w_{new}=w_{old}-\frac{lr}{\sqrt{R_{t}+0.00001}}G_{t} $$
Adam优化器
一阶矩估计
$$ m_{t}=\alpha_{1}m_{t-1}+(1-\alpha_{1})G_{t} $$
二阶矩估计
$$ r_{t}=\alpha_{2}r_{t-1}+(1-\alpha_2)G_{t}^{2} $$
偏差修正
由于m和r初始化为0,使得训练初期偏向于0,所以进行如下修正 $$ \hat{m_{t}}=\frac{m_{t}}{1-\alpha_{1}^{t}} $$ $$ \hat{r_{t}}=\frac{r_{t}}{1-\alpha_{2}^{t}} $$
参数更新
$$ w_{new} =w_{old}-\frac{lr}{\sqrt{\hat{r_{t}}+0.00001}}\hat{m_{t}} $$
AMSGrad
Adam使用指数平均保留历史梯度影响,其可能导致早期梯度对模型收敛具有绝对影响,而后期梯度对模型收敛无法产生影响,使得收敛过程动荡,甚至无法收敛
基于上述问题,AMSGrad给出调整策略,修改如下 $$ r_{t}=max(r_{t-1}, r_{t}) $$