
批次归一化 batch normalization
神经网络在参数更新后会导致数据分布的变化,网络收敛过程波动较大。通过归一化后,将每一层的输出数据归一化到均值为0方差为1的高斯分布中,可使收敛过程平缓,收敛效果更好。
批次归一化的方法与z-score数据标准化的方法是一致的
z-score 标准化
$$ 设数据集X(x1, x2, ...xn)有n个数据,数据集均值为M,数据集的标准差为σ $$ $$ M=\frac{\sum_{i=1}^{n}{x_i}}{n} $$ $$ \sigma = \sqrt{\frac{\sum_{i=1}^{n}{(x_i-M)^2}}{n}} $$
z-score标准化 $$ x_{i}^{'}=\frac{x_i-M}{\sigma} $$ 批次归一化即对每一层(直连层,卷积层)输出数据做z-score标准化
归一化
卷积层计算结果是一个三维数据集,h,w,c(直连层可视为 n,1,1的三维数据),批次归一化以通道channel为单位进行计算
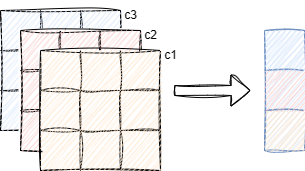
如图所示,对每一个通道计算均值和方差,分别使用各通道计算的均值和方差对该通道数据进行标准化计算
多batch
batch是网络训练的批次数量,即每次训练使用batch张图片,批次归一化针对的是batch个图像在该层输出数据的每一个通道进行计算
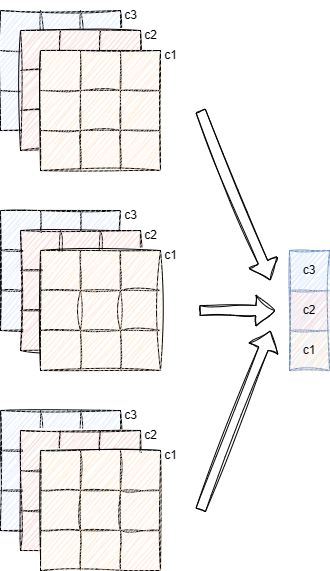
如图所示,对所有batch个数据每一个通道计算均值和方差,分别使用各通道计算的均值和方差对该通道数据进行标准化计算
指数移动平均(Exponential Moving Average, EMA)
batch normalization是为了卷积后的数据分布一致,所使用的均值是整体数据集的均值,方差也是整体数据集的方差,但是训练过程中计算的是一个batch的均值和方差,由于训练是以batch为单位更新参数的,所以使用一个batch的均值和方差是合理的,但在测试过程中所使用的就应当是整体数据的均值和方差。
虽然在训练过程中可以记录下所有的均值和方差,最后再求一个整体的平均,但是这样做占用太多的存储空间,时间效率也非常低下,所以采用指数移动平均

β越小当前抽样值权重越高,移动平均值实时性越强;β越大局部异常数据影响越小,移动平均值越平稳
在batch normalization中选择β为0.99
训练过程结束后rolling_mean和rolling_variance会作为训练参数存入权重文件,供测试时使用
Batch Normalize前向推导
z-score计算式如下 $$ x_{i}^{'}=\frac{x_i-M}{\sigma} $$ batch normalize还需要缩放因子γ和偏置项β,是为了防止数据分布呈现标准分布(mean=0,variance=1),γ和β是训练参数,跟随网络训练过程而改变,为输出数据带来更好的分布 $$ x_{i}^{'}=\gamma\frac{x_i-M}{\sigma}+\beta $$
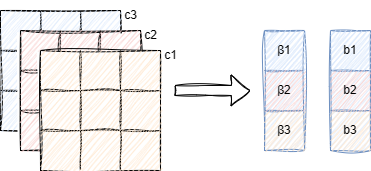
每一个通道对应一个缩放因子β和一个偏执项b
标准差σ可能为0,为了保证上式计算时,分母永不为0,添加一个极小数0.000001,所以最终的计算式为 $$ x_{i}^{'}=\gamma(\frac{x_i-M}{\sqrt{\sigma^{2} + 0.000001}})+\beta $$
梯度计算
$$ 设y=\gamma \hat y + \beta=\gamma(\frac{x_i-M}{\sqrt{\sigma^{2} + 0.000001}})+\beta $$ $$ \hat y = \frac{x_i-M}{\sqrt{\sigma^{2} + 0.000001}} $$ $$ \frac{\partial y}{\partial x_{i}} = \gamma \frac{\partial \hat y}{\partial x_{i}} $$
我们可以将计算式y做如下分解 $$ \hat y = f(x_{i},M,\sigma^{2})=\frac{x_i-M}{\sqrt{\sigma^{2} + 0.000001}} $$ 则由求导的链式法则可知 $$ \frac{\partial \hat y}{\partial x_{i}}=\frac{\partial f(x_{i},M,\sigma^{2})}{\partial x_{i}} \frac{\partial x_{i}}{\partial x_{i}}+\frac{\partial f(x_{i},M,\sigma^{2})}{\partial M} \frac{\partial M}{\partial x_{i}} + \frac{\partial f(x_{i},M,\sigma^{2})}{\partial \sigma^{2}} \frac{\partial \sigma^{2}}{\partial x_{i}} $$ $$ =\frac{\partial \hat y}{\partial x_{i}}+ \frac{\partial \hat y}{\partial M} \frac{\partial M}{\partial x_{i}}+\frac{\partial \hat y}{\partial \sigma^{2}} \frac{\partial \sigma^{2}}{\partial x_{i}} $$ 分别求导可得 $$ \frac{\partial \hat y}{\partial x_{i}}=\frac{1}{\sqrt{\sigma^{2}+0.000001}} $$ $$ \frac{\partial \hat y}{\partial M} = \frac{-1}{\sqrt{\sigma^{2}+0.000001}} $$ $$ \frac{\partial \hat y}{\partial \sigma^{2}} = -\frac{1}{2}(x_{i}-M)(\sigma^{2}+0.000001)^{-\frac{3}{2}} $$ $$ \frac{\partial M}{\partial x_{i}}=\frac{1}{n} $$ $$ \frac{\partial \sigma^{2}}{\partial x_{i}}= \frac{2}{n}(x_{i}-M) $$
这里值得注意的是方差的求导过程,如下
$$ \frac{\partial \sigma^{2}}{\partial x_{i}}=\frac{2}{n}(x_{i}-M)-\frac{2}{n^2}\sum_{i=1}^{n}(x_{i}-M) $$
$$ 事实上\frac{2}{n^2}\sum_{i=1}^{n}(x_{i}-M)=0 $$
$$ 因为\sum x_{i} = \sum M $$
权重更新
分别对缩放因子和偏执求导 $$ y_{i}=\gamma(\frac{x_i-M}{\sqrt{\sigma^{2} + 0.000001}})+\beta $$ $$ \frac{\partial y_{i}}{\partial \gamma} = \frac{x_{i}-M}{\sqrt{\sigma^{2}+0.000001}} $$ $$ \frac{\partial y_{i}}{\partial \beta} = 1 $$ 则在矩阵运算条件下,权重更新公式如下 $$ \gamma_{update} = \gamma + rate * \sum_{i=1}^{n}(\frac{x_{i}-M}{\sqrt{\sigma^2+0.000001}}*delta_{i}) $$ $$ \beta_{update} =\beta + rate * \sum_{i=1}^{n}delta_{i} $$